 当前位置:
当前位置:在旋转时输出扭矩的平滑,需要考虑每个器件独特的需求。而电机旋转的稳定性则与其物理结构和控制模式密切相关。
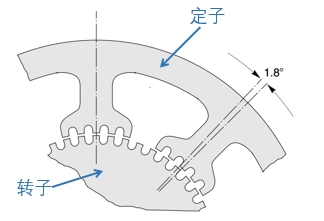
步进电机属于直无刷(BLDC) 电机,它按照等长的步进值逐步转动。而双极性步进电机则是每相都拥有一个绕组的步进电机,具体而言,为两相四线步进电机。它由定子和转子两个主要部件组成(见图 1)。

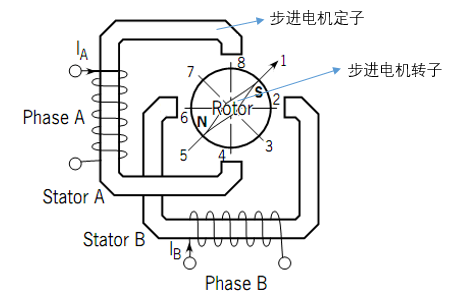
A 相的绕组从定子 1 开始,然后依次绕到定子 3、定子 5 和定子 7(见图 2)。 注意,定子1和定子5的绕组方向相同,而定子3和定子7的绕组方向相同。这两组绕组(定子 1 和定子 5,以及定子 3 和定子 7)的绕线方向相反。B相的绕组原理与之相同,其中定子4和定子8为一组,定子2和定子6为一组。
永磁体的磁力线在电机主体中形成闭合。由于磁力线和磁阻效应,步进电机即使在不通电的情况下也有一定的锁定力矩(见图4)。
根据齿数和相位结构,转子共有50个齿与定子齿轮相对,步进角度为1.8度(见图5)。步进角度定义为当电气周期完成90度时,步进电机转子向前移动的机械角度。
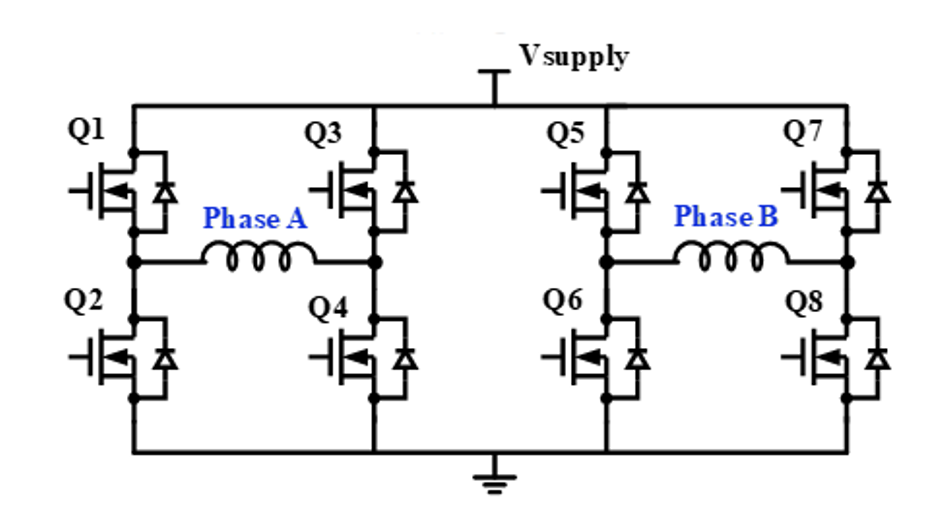
步进电机的定子和转子可以被看作只有一个齿,这使步进电机的驱动方式不同于其他电机。这种方法称为双全桥驱动,其中 A 相绕组连接到第一个全桥驱动器,而 B 相绕组连接到第二个全桥驱动器(见图 7)。
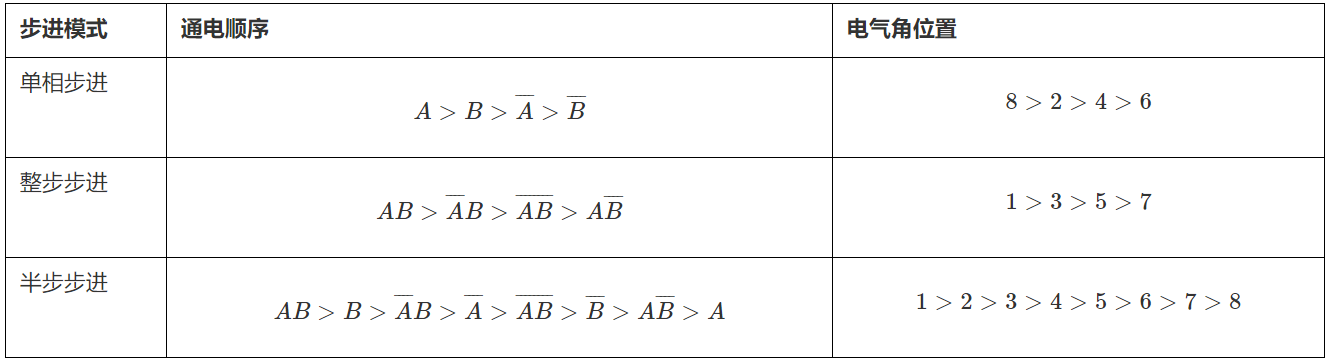
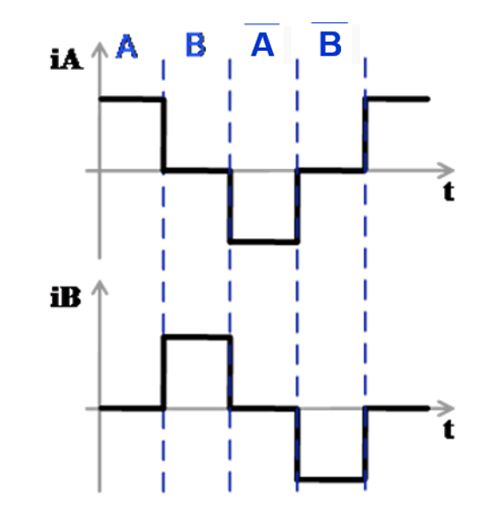
当电机按单相步进方式依次驱动A相和B相时,定子磁场发生变化,转子因极性吸引而转动。表1中详细描述了 A 相和 B 相 (AB) 的通电顺序和转子的旋转位置。
1. A相被驱动时,驱动电流从Q1流向Q4。在此期间,定子 A 的上端在 N,下端在 S,转子转到位置 8(见图 6)。
2. 接下来,B相被驱动,驱动电流从Q5流向Q8。定子 B 的一端在 S,另一端在 N,转子转到位置 2(见图 6)。
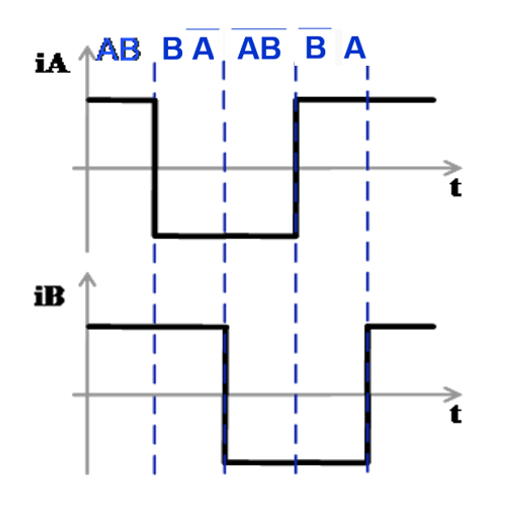
与单相步进不同,A 相和 B 相绕组在整步模式下将被同时驱动。另外还有四种对应的通电模式和转子电气位置;其位置空间在电气空间上不同于单相步进。 转子可以根据器件的启动顺序旋转。图 9 显示了 AB 相的整步电流波形。
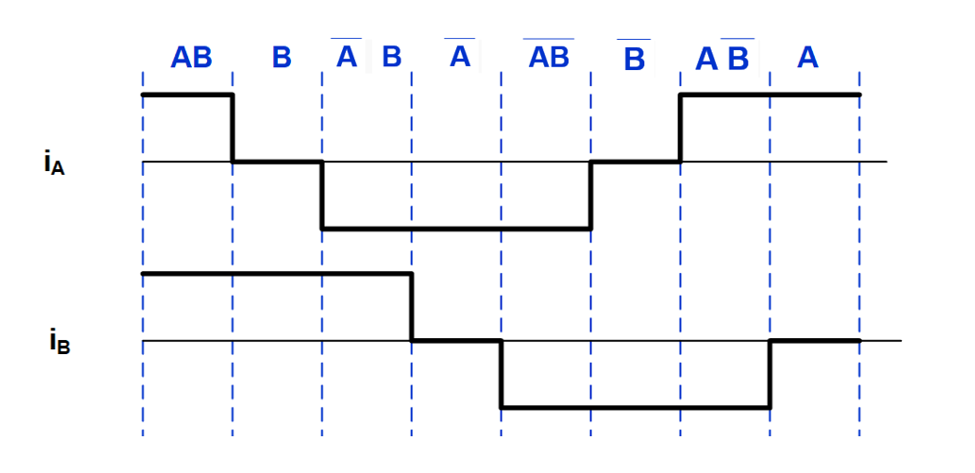
在半步模式下,单相和整步步进共同工作,可以提供更多的电气角度位置、更详细的电流波形和更平滑的旋转。
图 10 显示了单相到两相操作的非循环半步模式。 这种模式在整步和半步之间交替生成 8 步序列。
本文回顾了双极性步进电机的基本组件(定子和转子),及其三种主要的控制模式:单相步进、整步步进和半步步进。在下一篇文章中,我们将讨论双全桥驱动的微步进模式。

 one@juli-china.com
one@juli-china.com